ロス・ゼロとリードタイムの短縮を
実現いたします
各シミュレーションによるデバッグのフロントローディングによりロス・ゼロの実現とリードタイム短縮を実現いたします。
業務内容
動作・制御 シミュレーション(iCADSX IOC・e-Sys)
iCADSX・e-Sysの3DモデルをPLCラダープログラムによりシミュレーション
- 3Dメカ設計の設計検証として3Dモデル間の干渉チェックが可能
- PLCラダープログラムによるシミュレーションにより動的な干渉チェック
タイムチャートとロジアナ機能による干渉チェック
- ユニット単位での動的な干渉含めてチェックが可能
- 設計上でリアルなタクト検証が可能
3DモデルをPLCラダープログラムで制御する事前の制御検証
- 3Dモデルでの原点復帰、エラー時の動作制御検証が可能
- ラダープログラム事前検証(デバッグ)
メカ検証・制御検証のフロントローディングで得られるメリット
- 装置立ち上がりリードタイム短縮及び実機試運転調整の工期短縮が可能
3D設計及び動作・制御 シミュレーションによるモデルの活用
- 遠隔地システムのモデル上での設計変更により工期短縮
- システム変更時3Dモデルによる検証で現地デバッグ工期短縮が可能
3D設計及び動作・制御 シミュレーションによるモデルの活用
FAシステムの3D設計をベースとしたRBシミュレーションとの協調設計
- 構想設計段階でのRBシミュレーションによる動作検証(範囲、タクト)
- 構想設計段階でのRBシミュレーションによる能力検証(可搬重量、加速度)
FAシステムとロボットを統合したFAロボットシステムの3D設計
- 詳細設計段階での動作デバッグによる事後の干渉回避
- 詳細設計段階でのロボットの詳細動作の作り込み
RBシミュレーションによる制御検証
- 制御設計によるPLCラダープログラムの事前検証とRB制御検証
- ロボットのオフラインティーチングによる動作検証とプログラム検証
RBシミュレーションによるロボットソースプログラムのコンパイル
- オフラインティーチングによるロボットプログラムの作り込みと周辺装置との干渉チェック
VRS Labo
豊富な設備が整った充実した環境があります。
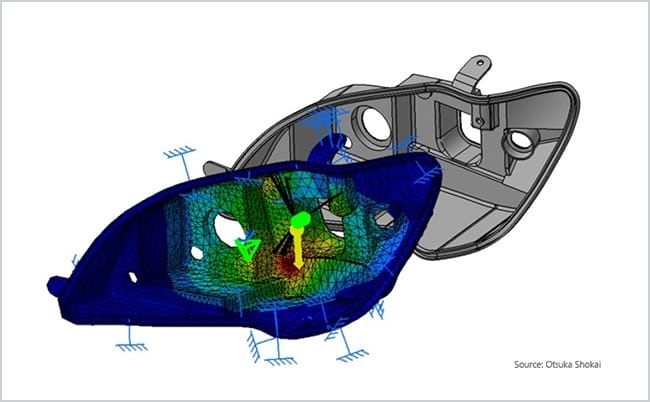
解析やシミュレーションについて、各種解析ソフトの導入により、
3次元設計における静的な応力ひずみ解析による設計検証を行い、最適な機構・構造・形状の提案を実現しています。
-

SOLIDWORKS
Simulation Professional製品の機械的強度、耐久性、トポロジー最適化、固有振動数を検証すると共に、熱伝導や座屈の不安定性を検証し、製品設計の最適化を図ることができます。
-
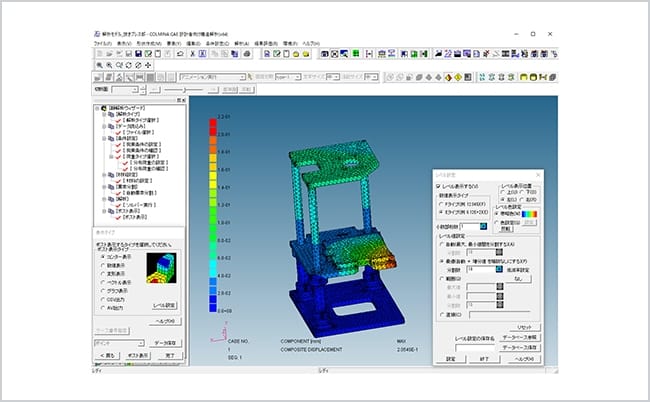
iCAD SX FJKSWAD
設計者向け構造解析ソフトウェア設計者向けの構造・熱解析ソフトウェアです。設計の早い段階から、設計者自身が製品の 強度・振動・熱に関する性能評価を行うことができます。
-
CATIA Analysis
CAD上で解析できる快適な操作性だけでなく、高い拡張性も持っています。線形静解析のみならず動的応答解析、熱伝導解析、非線形解析などもオプション製品の追加により可能です。